ABSTRACT
The unhealthy and destructive motion exhibited in moving, operating or rotating machinery is called vibration. It is also observed as any oscillatory motion of a mechanical system about its equilibrium point. Clearly, vibration can thus be unhealthy and destructive which is the reason for its undesirability. However, it can also be good and useful as observed in some mechanical and construction equipment. Vibration can be observed in pendulum set in motion, a plucked guitar string, vehicles driven on rough terrain and geological activities like earthquakes. It is also observed in vibratory conveyors, washing machines, electric massaging units, compactors, hoppers and the like. Thus the focus of vibration study is to reduce vibration through proper design of machines and their mountings. In this connection, the mechanical engineer tries to design the engine or machine to minimize imbalance, while the structural engineer tries to design the supporting structure to ensure that the effect of the imbalance is harmless. In spite of its detrimental effects, vibration can be utilized profitably in several consumer and industrial applications. The efficiency of certain machining, casting, forging, and welding processes has been found to be improved by vibration. It is also employed to simulate earthquakes for geological research and to conduct studies in the design of nuclear reactors. Clearly, vibration studies concentrated on the undesirability of vibration and how to reduce its effect. The studies also stressed the need to improve the efficiency of applications where vibration is desirable. The aforementioned studies notwithstanding and going by the recent earthquake in Mexico as well as the flooding and storm in various parts of the world, the last is yet to be heard about the devastating effect of vibration. This work presents the various vibration types through worked examples. It may open a floodgate of new investigations into the effect of the various vibration types which may in turn lead to new designs and fabrication of appropriate engineering devices to control and reduce to the barest minimum the harmful effect of the various vibration types.
Key words: Vibration, mechanical device, engineering systems.
Vibration is experienced in most human activities like hearing, seeing, breathing, walking and speaking. Hearing because the eardrum vibrates, seeing because light waves are involved in vibration. Breathing is due to the vibration of lungs, walking is due to the oscillatory motion of legs/hands and speaking is due to the oscillatory motion of tongues and larynges. According to Beards (1995), early studies of vibration concentrated on the understanding of the natural phenomena and developing mathematical theories that described the vibration of physical systems. However, recent investigations motivated by engineering research on the applications of vibration revealed that most vibrational problems are due to inherent imbalance in the engines of machines/devices. The imbalance may result from faulty design or poor manufacture. Imbalance in diesel engines, for example, can cause ground waves sufficiently powerful to create a nuisance in urban areas. The wheels of some locomotives can rise more than a centimeter off the track at high speeds due to imbalance. Vibrations cause spectacular mechanical failures. The structure or machine component subjected to vibration can fail because of material fatigue resulting from the cyclic variation of the induced stress.
Furthermore, vibration causes more rapid wear of machine parts such as bearings and gears and also creates excessive noise. In machines, vibration can loosen fasteners such as nuts. In metal cutting processes, vibration can cause chatter, which leads to a poor surface finish. There is a phenomenon called resonance which occurs whenever the natural frequency of vibration of a machine or structure coincides with the frequency of the external excitation. Resonance leads to excessive deflections and failure (Thorby, 2008). Literatures abound with accounts of system failures brought about by resonance and excessive vibration of components and systems. Also, vibration testing has become a standard procedure in the design and development of most engineering systems because of the devastating effects that vibrations can have on machines and structures. Human beings act as integral part of many engineering systems. The transmission of vibration to human beings results in discomfort and loss of efficiency. For instance, discomfort is experienced by passengers in an aircraft when the frequencies of vibration of the wings of the aircraft correspond to the natural frequencies of the human body or organs.
In fact, it is well known that the resonant frequency of the human intestinal tract (approximately 4-8 Hz) should be avoided at all costs when designing high performance aircraft and reusable launch vehicles because sustained exposure can cause serious internal trauma (Leatherwood and Dempsey, 1976). The vibration of the wing of aircraft for an extended period may lead to large vibration amplitudes which are potential cause of crash in aircrafts with attendant fatalities. Wing vibrations of this type are usually associated with the wide variety of flutter phenomena caused by fluid-structure interactions. The most famous engineering disaster of all time was the Tacoma Narrows Bridge disaster in 1940. It failed due to the same type of self-excited vibratory behavior that occurs in aircraft wings. According to Vyas (2003), the vibration and noise generated by engines cause annoyance to people and, sometimes, damage to property. Vibration of instrument panels can cause their malfunction or difficulty in reading the meters. Edelugo (2009) asserts that systems are generally involved in the following vibration types namely free, undamped vibration, forced undamped vibration, free, damped vibration and forced damped vibration for one, two or more degrees of freedom cases. He also explains that the phenomena of vibration involves the interplay between potential energy and kinetic energy.
A vibrating system must have a component that stores potential energy (spring) and releases kinetic energy in the form of motion (vibration) of a mass. The motion of the mass then gives up kinetic energy to the potential energy storing device (damper). Vibration can occur in many directions and can be the result of the interaction of many objects. He concludes that vibration is therefore modeled mathematically based on fundamental principles such as Newton’s laws and analyzed using results from calculus and differential equations. The fundamental Kinematic quantities used to describe the motion of a particle are displacement, velocity and acceleration vectors. In translational motion, displacements are defined as linear distances and in rotational (torsional) motion, displacements are defined as angular motions. In addition, Goga (2012) states that though a single physical structure may store both kinetic and potential energy, and may dissipate energy, consideration is only given to lumped parameter systems composed of ideal springs, masses, and dampers wherein each element has only a single function. In nature, vibrations are also used by all kinds of different species in their daily lives.
For example, vibrations are used by spiders to detect the presence of flies and other insects as they struggle after being captured in the web for food. Many different types of mining operations apply vibration to sort particles into different sizes. Vyas (2003) opined that excess vibration shortens equipment lifespan. Therefore vibration concept should be paramount in the design of mechanical engineering equipment since vibration in engineering cannot be eliminated but can be controlled to a minimum. The aforementioned studies notwithstanding and going by the recent earthquake in Mexico as well as the flooding and storm in various parts of the world, the last is yet to be heard about the devastating effect of vibration. This work presents the various vibration types through worked examples. It may engender a floodgate of new investigations into the effect of the various vibration types by designing and forming appropriate engineering devices to control and reduce to the barest minimum the harmful effect of the various vibration types.
MODEL OF THE VARIOUS TYPES OF VIBRATION
Free Undamped Vibration
mẠ+ kx = 0
Where m is the mass, k is the spring constant, Ạis the acceleration and x, the displacement. Free, Damped Vibration
0 = Kx + bẋ + máº
Where Kx is spring force, bẋ is the damping force, mẠis the inertial force and b is the damping coefficient.
Forced, Damped Vibration
F(t) = Kx + bẋ + máº
Where f(t) is the driving force (external)
Forced, Undamped Vibration
F(t) = Kx + máº
(Edelugo, 2009; Thorby, 2008).
WORKED EXAMPLES OF THE VARIOUS TYPES OF VIBRATION
Free, Undamped Vibration
Example 1
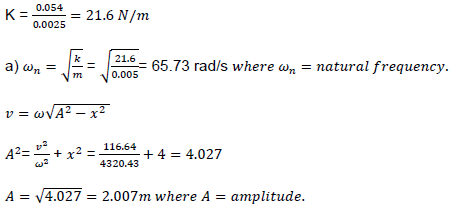
A spiral spring with its axis horizontal is fixed to a vertical solid wall, a football of mass 5 g is thrown horizontally at 10.8 m/s against the spring and compresses 2.5 mm
a) Estimate the spring constant.
b) After leaving the spring, the ball falls to a floor which is 2m below the spring. How far from the wall will it strike the floor?
Solution:
a) Momentum change = Force
= 5( (10.8) = 0.054 N
Kx = -m = Force (Free, undamped vibration)
K (0.0025) = 0.054
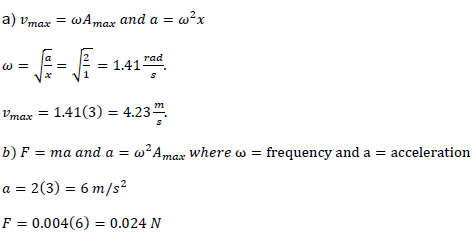
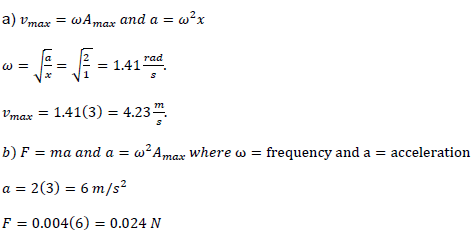
Example 2
A 4 g body is moving with SHM of amplitude 3 m, if the acceleration is 2 m/s2 when the displacement is 1 m.
a) What is the maximum velocity of the body?
b) What is the force on the body at the instant when its displacement is a maximum?
Solution:
Free, Damped Vibration
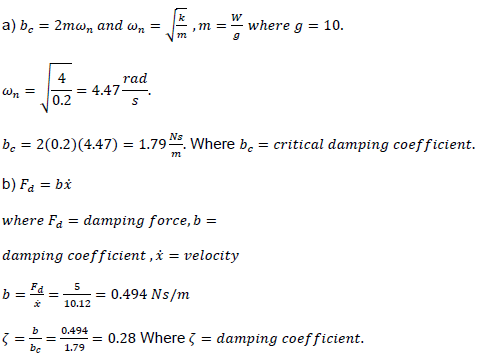
Example 1
a) A weight of 2 N is attached to the end of a spring with stiffness of 4 N/m. Determine the critical damping coefficient.
b) To calibrate a dashpot, the velocity of the plunger was measured when a given force was applied to it. If a 0.5 N weight produced a constant velocity of 101.2 cm/s., determine the damping factor when used with the system in (a).
Solution:
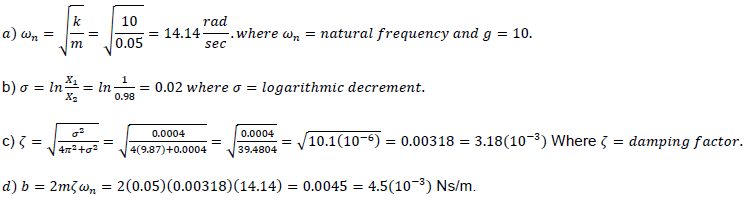
Example 2
A vibrating system consisting of a weight 0.5 N and stiffness 10 N/m is viscously damped such that the ratio of every consecutive amplitude is 1.00 to 0.98. Determine
a) The natural frequency of the damper
b) The logarithmic decrement
c) The damping factor
d) The damping coefficient.
Solution:
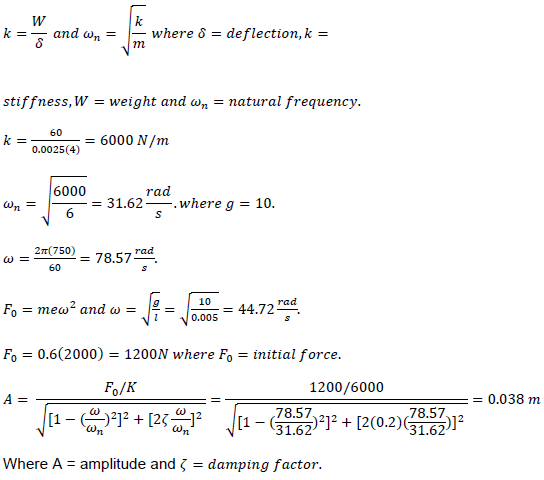
Forced, Damped Vibration
Example 1
A small motor driven compressor set weighs 60 N and causes each of the four rubber isolators on which it is mounted to deflect 2.5 mm. The motor runs at a speed of 750 rpm. The compressor has a 5 mm stroke. The piston and the reciprocating parts weigh 0.6 N and for the purpose of this problem, the reciprocating motion of the piston is assumed to be simple harmonic. Determine the amplitude of vertical motion at the operating speed. Assume damping factor of rubber is 0.2.
Solution:
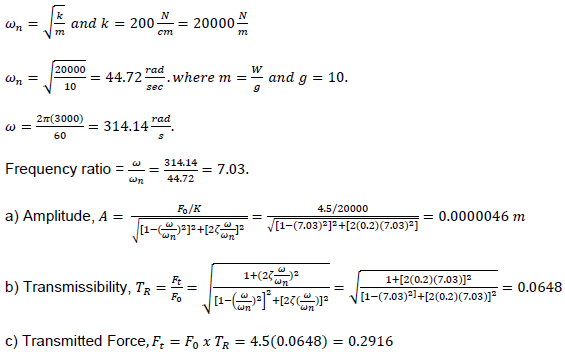
Example 2
A machine weighing 100 N and supported on springs of stiffness 200 N/cm has an unbalance rotating element which results in a disturbing force of 4.5 N at a speed of 3000 rpm. Assume a damping factor of 0.2 and determine;
a) The amplitude of motion due to the unbalance.
b) The transmissibility
c) The transmitted force.
Solution:
The vibration of a rigid body about a specific reference point that is measured in terms of angular coordinates is known as Torsional Vibration. The restoring moment in Torsional Vibration may either be due to the torsion of the elastic member, the unbalanced moment, a force or couple. Examples of torsional vibration include the rotor system (fixed at one or both ends), the geared system and the shaft system (deflection, critical speed and equivalent shaft).
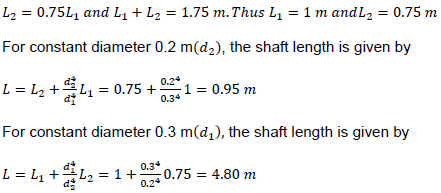
Example 1
A shaft of composite sections has a total length of 1.75 m. One section is 75% as long as the other with diameter of 20 cm and 30 cm respectively. Determine the equivalent shaft length.
Solution:
Example 2
Determine the critical speed and frequency of a shaft with the following weights and deflections:
W1 = 60 N, δ1 = 2 mm.
W2 = 62 N, δ2 = 2 mm.
W3 = 61 N, δ3 = 2 mm.
Solution:
From the model and worked examples, the free, unhindered vibration poses little or no harmful effect. Applications and devices of this vibration type only need improvement in efficiency like the spring and the moving body exhibiting simple harmonic motion (SHM) in the worked examples. Both items are devoid of damping and external excitation. In the free, damped vibration, damping is introduced. There are three main special cases of damping namely under, critical and over damping. We also have damping coefficient and damping factor. Dampers should be so designed with appropriate damping coefficient and damping factor to address the special cases of damping whenever vibration type of this nature occurs. The worked examples indicate the need to determine the damping coefficient and the damping factor of the damper as well as its logarithmic difference for effective control of vibration of this nature. For the forced, damped vibration, external force or excitation comes into play in addition to damping. The excitation may lead to resonance with its attendant harmful effect.
The worked examples deal with the amplitude, transmissibility and transmitted forces due to the external excitation. It is worth to note that almost all machine vibrations are due to either repeating (exciting) forces, imbalance, resonance or some combination of these causes. The causes of vibration of this nature lead to breakdowns, failures and sometimes fatalities of machinery and equipment. In the case of forced, undamped vibration, the vibration due to excitation is transmitted without any damping. This is analogous to earthquake where the earth tremor is transmitted to infrastructures without any control to its devastating effect. This suggests a revisit to the design and fabrication of appropriate devices like damper to control and reduce to minimum the harmful effect of vibration. Similar design of vibration sensors should be revisited to monitor and report tremors (tectonison). The harmful effect of earthquake and flooding may be mitigated through proactive action as a result of timely report of same. There is therefore the need to seek the intervention of divine providence.
An important purpose of vibration study is to reduce vibration through proper design of machines and their mountings. In this connection, the mechanical engineer tries to design the engine or machine to minimize imbalance while the structural engineer tries to design the supporting structure to ensure that the effect of the imbalance will be harmless. Notwithstanding its detrimental effects, vibration can be utilized profitably in several consumer and industrial applications. The importance of vibration is not limited to engineering systems but extends to other areas of human existence. The advantages of vibration appear to outweigh its disadvantages (undesirability). This is mainly due to the proper management of the advantages of vibration by deploying sound engineering principles/practices. These engineering feats notwithstanding and going by the recent destruction caused by earthquake in Mexico and flooding in various parts of the globe there is the need to revisit the phenomenon called vibration and its various types. It is hoped that the worked examples as well as the discussion therein will encourage a floodgate of new investigations into the various vibration types with the view to designing and fabricating new devices to control to the barest minimum the devastating effect of vibration.
The author has not declared any conflict of interests.
REFERENCES
|
Beards CF (1995). Engineering Vibration Analysis with Application to Control Systems. Edward Arnold, a division of Hodder Headline PLC.
View
|
|
|
|
Edelugo SO (2009). Mechanical Vibrations and the Balance of Multi-Cylinder Engines. An Engineering text covering the fourth and fifth year course contents in Mechanical Engineering Vibrations and the Balance of Multi-cylinder Engines.Publisher: De – Adroit Innovation.
|
|
|
|
|
Goga V (2012). Mechanical Vibration – Chapter 1: Introduction.
View. Uploaded 22/10/2012.
|
|
|
|
|
Leatherwood JD, Dempsey TK (1976). Psychophysical relationships characterizing human response to whole-body sinusoidal vertical vibration. NASA-TN-D-8188, L-10496. Washington, United States. NASA Langley Research Center; Hampton, VA, United States 36p.
|
|
|
|
|
Thorby D (2008). Structural Dynamics and Vibration in Practice. An Engineering Handbook. Butterworth-Heinemann, Elsevier 420p.
|
|
|
|
|
Vyas M (2003). Vibration Monitoring System Basics. Shinkawa Marketing Team, Forbes Marshall P. Ltd. Pune. pp. 1-38.
|
|